TEMA DE ACTUALIDAD
Empleo de la cirugía robótica en Otorrinolaringología y Cirugía de Cabeza y Cuello
Employment of the robotic surgery in Otorhinolaryngology and Head and Neck Surgery
Dr. Héctor Hernández Sánchez I, Dra. Mabelys Gutiérrez Carrera I
I Hospital Militar Central "Dr. Luís Díaz Soto". La Habana, Cuba
RESUMEN
La cirugía robótica ofrece a la cirugía la tecnología más novedosa para su aplicación en la resolución de exigentes procedimientos quirúrgicos; siendo vital el conocimiento de sus beneficios con vistas a afrontar los cambios que trae aparejados. En el presente artículo se realiza una análisis de la evolución de los sistemas quirúrgicos robóticos, de los que el da Vinci® es su principal exponente; así como la paulatina introducción de los mismos en el campo de la Otorrinolaringología y Cirugía de Cabeza y Cuello, destacándose las principales patologías tributarias de su empleo; la importancia de la capacitación y entrenamiento del personal; así como la necesidad de realizar un análisis del costo/efectividad y costo/beneficio de su adopción.
PALABRAS CLAVE: Sistemas quirúrgicos robóticos, Otorrinolaringología, Cirugía de Cabeza y Cuello, daño auditivo, sistema robótico da Vinci.
ABSTRACT
The surgery robotics offers to the surgery the most novel technology for its application in the resolution of surgical demanding procedures; being vital the knowledge of its benefits with a view to confronting the changes that it brings harnessed. Presently article is carried out an analysis of the evolution of the robotic surgical system, of those that the one it da Vinci® its main exponent; as well as the gradual introduction of the same ones in the field of the Otorhinolaryngology and Head and Neck Surgery, standing out the tributary main pathologies of its employment; the importance of the qualification and the personnel's training; as well as the necessity to carry out an analysis of the cost/effectiveness and cost/benefit of its adoption.
KEY WORDS: Robotic surgical system, Otorhinolaryngology, Head and Neck Surgery, da Vinci Surgical Robot.
INTRODUCCIÓN
El escritor checoslovaco, Karel Čapek, fue el primero en acuñar el término robot, derivada de la palabra eslava, esclavo o siervo; y para otros de la palabra checa, robota "trabajo". El término aparece por primera vez en el año 1920, en su obra de teatro R.U.R. (Robots Universales Rossum). 1
De acuerdo con la definición realizada en 1979 por el Instituto de Robot de América, un robot es un "Manipulador reprogramable multifunctional diseñado para cambiar de lugar materiales, piezas, herramientas o dispositivos especializados, mediante variables de movimiento programadas para mejorar el rendimiento de esta variedad de tareas". 1 La palabra robótica, usada para describir este campo de estudio, fue acuñada por el escritor de ciencia ficción ruso Isaac Asimov, quien realizó la definición más completa del término robot, "Estructuras mecánicas, en algunos casos similares a los seres humanos, que son capaces de realizar una variedad de tareas, en algunos casos complejos, bajo el comando humano o mediante programación previa". 2
Mientras que la evolución de la robótica en la industria ha sido notable desde su introducción a finales de los años 60, su extensión en el sector de servicios y en el ámbito de la medicina no empieza a tener incidencia hasta la década de los 90. 3
La evolución tecnológica que progresivamente ha ido transformando los quirófanos, ha propiciado una importante evolución de los procedimientos quirúrgicos, por otra parte, la cirugía no puede considerarse limitada al propio acto quirúrgico, sino que va directamente ligada al procedimiento previo de exploración, diagnóstico y planificación de la intervención; así, el diagnóstico por imagen, la evolución de la informática, con su incidencia en los equipos de diagnostico, de soporte a la cirugía y la sofisticación de equipos, materiales e instrumental, han dado lugar a un cambio drástico en la cirugía. 3
El primer sistema quirúrgico robótico desarrollado fue denominado Puma 560, siendo utilizado en 1985 para realizar biopsias neuroquirúrgicas con mayor precisión. Desde ese primer logro otras series de robots han sido desarrollados. 4
El sistema quirúrgico da Vinci® (Intuitive Surgical Inc., Sunnyvale, CA, USA) fue introducido al mercado en 1999, recibiendo este nombre en homenaje a Leonardo da Vinci. En julio del 2000 fue el primero aprobado por la Administración norteamericana para Alimentos y Drogas (US Food and Drug Administration, FDA) para ser empleado en cirugía general 5 y en 2009 para la realización de Cirugía Robótica TransOral (CRTO) en cirugía de cabeza y cuello, el sistema quirúrgico robótico da Vinci. 4
Este sistema tiene sus antecedentes en el deseo de la administración nacional aeronáutica y espacial (NASA) de desarrollar un método para prover atención quirúrgica a los astronautas mediante cirugía telepresencial. El interés en esta tecnología provino del laboratorio de investigación de Stanford y del ejército de los Estados Unidos, que vio la esperanza de traer esta tecnología al campo de batalla para prover asistencia quirúrgica a los soldado heridos lo antes posible, lo que incluye la intervención del cirujano de forma remota. En 1995, Intuitive Surgical Corporation fue encargada de producir sistemas telerobóticos para uso público comercial, siendo empleado primeramente en cirugía general. (Cadiere et al.1999) reporta los primeros dos casos de fonduplicatura asistida por robot; (Weber et al. 2002) reporta la primera colectomía asistida por robot, mientras que la primera cirugía robótica transoral (CRTO) en cabeza y cuello fue realizada en 2005 por Macleod y Melder, para extirpar un quiste vallecular. En 2006, tres pacientes con tumores de base de lengua experimentaron el empleo de la CRTO como parte de un ensayo clínico prospectivo realizado por O'Malley Jr. et al. 4
Es importante aclarar que aunque el término "cirugía robótica" puede dar la impresión que el robot ejecuta por sí solo el proceder quirúrgico, en realidad no es así, al no poder actuar de forma autónoma, replicando a escala y en forma precisa los movimientos que el cirujano hace en la consola de control.
El sistema quirúrgico robótico da Vinci® amplía la capacidad del cirujano de operar el interior del cuerpo humano de forma menos invasiva; eliminado los principales inconvenientes de la laparoscopia convencional: la visualización, la coordinación manos-ojos y las limitaciones del movimiento manual. Estos avances han hecho disminuir la curva de aprendizaje y el tiempo operatorio y la convierten en un procedimiento quirúrgico atractivo e inimaginable para los cirujanos. 6
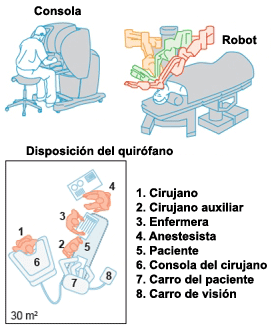
El sistema consta de tres partes principales 1) Consola del cirujano; 2) Robot quirúrgico y 3) Sistema de visión. (Fig. 1)
Fig. 1. Componentes del sistema quirúrgico robótico da Vinci®
La consola del cirujano consiste en un visualizador que presenta imágenes 3-D obtenidas a partir de la cámara endoscópica que está dentro del cuerpo del paciente. El término “manipulación amo-esclavo” se refiere a la consola del cirujano, equipada con manipuladores “amos” que controlan 1) los movimientos de los manipuladores quirúrgicos correspondientes (“manipulador esclavo”) que sostienen los instrumentos quirúrgicos Endo Wrist®, que favorece el movimiento multigrado de libertad que imita y mejora la articulación de la mano del cirujano en cuanto a aumento de la destreza y 2) el manipulador de la cámara endoscópica durante el procedimiento. 6
La cirugía robótica ofrece a la cirugía la tecnología más novedosa para su aplicación en la resolución de exigentes procedimientos quirúrgicos. 2
La evolución de la terapéutica quirúrgica ha sido vertiginosa y desde los principios clásicos de la cirugía a cielo abierto la evolución ha llevado a través de la laparoscopia a la actual cirugía robótica, en la cual, se ha logrado la aplicación exitosa de los preceptos de la ingeniería robótica (programabilidad, capacidad mecánica, flexibilidad y automatismo) al quehacer diario del cirujano. El desarrollo de la cirugía mínimamente invasiva, inicialmente liderado por la laparoscopia convencional, constituyó terreno fértil para el desarrollo de técnicas quirúrgicas con el uso del robot, aportando beneficios como la realización de incisiones pequeñas, que se traducen en menor dolor, incomodidad y mejor resultado estético; menos anestesia/analgesia; disminución de la hemorragia intraoperatoria; magnificación del campo quirúrgico que ofrece mayor detalle al cirujano; menor trauma para el organismo lo que redunda en menor formación de tejido cicatricial; menor riesgo de infección; menor estadía hospitalaria y recuperación/vuelta a las actividades diarias normales y al trabajo más rápida. Por otra parte la tecnología robótica ha aportado al campo laparoscópico beneficios como la visión de profundidad tridimensional (3D); movimiento multigrado de libertad que imita y mejora la articulación de la mano del cirujano, posibilidad de tutoría y asistencia a distancia de procedimientos quirúrgicos complejos; lo que debe permitir ofrecer mejores resultados en las series clínicas en la medida del tiempo. 2, 6, 7
APLICACIONES CLÍNICAS DE LA CIRUGÍA ROBÓTICA EN OTORRINOLARINGOLOGÍA Y CIRUGÍA DE CABEZA Y CUELLO
La cirugía de cabeza y cuello a presentado un desarrollo vertiginoso durante los últimos 20 años con un enfoque quirúrgico dirigido a la preservación de las estructuras anatómicas (cirugía conservadora), destacándose, la disección selectiva del cuello, laringectomía parcial supracricoidea, cirugía láser transoral, entre otras. 8
En la cabeza y el cuello, las estructuras anatómicas vitales están ubicadas muy cerca una de otra, necesitándose precisión en su abordaje; por otra parte las intervenciones son realizadas a través de orificios naturales como la boca, nariz u oído, disponiéndose de un espacio reducido. En procedimientos que requieren incisiones externas, como es el caso de las lesiones neoplásicas, debe existir un balance entre resultados cosméticos y el acceso adecuado. Las ventajas de la cirugía robótica pueden ayudar a corregir estos factores adversos y con la adición de técnicas intraoperatorias guiadas por imagen, los cirujanos pueden localizar con exactitud y resecar completamente cualquier tumor con márgenes de seguridad adecuados. 1
Tumores malignos de cabeza y cuello: El empleo de la cirugía transoral de la orofaringe fue descrita en 1951 en un caso reportado por Huet en Francia. 9 O’Malley Jr. et al. inician los estudios relacionados con el empleo de la Cirugía Robótica TransOral (CRTO) en perros y cadáveres llevando la técnica a la práctica clínica. En 2006 se realiza una resección transoral de base de lengua asistida por robot a 3 pacientes, en un ensayo clínico prospectivo. Estos estudios preliminares marcaron la viabilidad de la CRTO en la resección de lesiones tumorales, revisándose los resultados funcionales de estos procedimientos e informando mayormente el tratamiento de tumores malignos de cavidad oral y orofaringe, existiendo otros reportes sobre casos con tumores malignos de laringe e hipofaringe tratados con CRTO. 4, 9, 10
Su empleo ha evidenciado un elevado control local del tumor y una baja morbilidad quirúrgica. 11 La técnica exige que el cirujano tenga sólidos conocimientos anatómicos para prever qué estructuras se encuentran relacionadas con el tumor, tener paciencia al realizar este tipo de cirugía, elevar el nivel de experiencia con la técnica quirúrgica continuamente, así como disminuir el tiempo quirúrgico en las disecciones anatómicas. 9, 12
Tumores benignos de cabeza y cuello: El primer reporte de la aplicación clínica de la CRTO en tumores benignos fue realizada por MacLeod y Melder, y consistió en la marsupialización de un quiste vallecular. Vicini et al evaluaron la efectividad de la cirugía asistida por robot en la apnea obstructiva del sueño. En estos estudios a 20 pacientes se les realizó resección de la base de la lengua y en otros se considero la realización de supraglotoplastía y/o uvulopalatoplastia. 4
Cirugía de base de cráneo: Los primeros estudios sobre el empleo del la CRTO en la base del cráneo fueron iniciados por O’Malley Jr. y Weinstein. Ellos fueron los primeros en reportar la resección de un tumor quístico parafaríngeo con extensión a la fosa infratemporal, sin evidenciarse complicaciones quirúrgicas. En otro estudio realizado en 2010 por estos autores, se reporta la resección del espacio parafaríngeo en 9 de 10 pacientes empleando CRTO, con un tiempo quirúrgico y pérdida de sangre aceptable, no presentándose complicaciones significativas como hemorragia, infección, trismo o recurrencia del tumor. 4
La preocupación respecto a la identificación de estructuras importantes, como la arteria carótida, la vena yugular y los nervios craneales dejo de existir, al demostrarse de forma apropiada la técnica quirúrgica y el control de la hemostasia. 4, 13
Cirugía de oído: Brett describió en 1995 el primer uso propuesto de la cirugía robótica en Otorrinolaringología al automatizar un micro taladro para la realización de una estapedotomía. En su estudio de laboratorio, fue capaz de controlar el avance de la broca a 0,02 mm de la posición ideal. En aquel momento concluyeron que su propuesta no estaba lista para ser empleada por la falta de investigaciones clínicas relacionadas con la seguridad, higiene y la asimilación del campo quirúrgico. 1
De los robots autónomos, el sistema Robodoc® (Integrated Surgical Systems, Davis, CA, USA) es el más ampliamente empleado y mencionado. Este sistema fue diseñado para realizar cirugía reconstructiva articular en Ortopedia y ha sido usado en más de 20,000 casos. En el campo otorrinolaringológico el sistema es preconizado para la realización de intervenciones en afecciones otológicas. 14
Es conocido que en el campo de la otología la técnica principal para el tratamiento de los casos es la mastoidectomía, en la cual el hueso es fresado para exponer las estructuras anatómicas sin dañarlas. La mastoidectomía se presta para un acceso robótico autónomo por dos razones: a) el tejido a resecar se encuentra recubierto de hueso rígido, y b) las estructuras anatómicas críticas se encuentran ocultas hasta ser mostradas por la resección. La primera de estas dos razones hace viable la cirugía robótica autónoma; el segundo lo hace útil. La rigidez de hueso es esencial porque asegura que la estructura tridimensional del blanco anatómico sea la misma durante la obtención de las imágenes preoperatorias, planificación y realización de la subsiguiente intervención quirúrgica. La presencia de estructuras anatómicas criticas ocultas (nervios, vasos sanguíneos y otras estructuras que deben ser preservadas), explota la utilidad de la cirugía asistida por robot, debido a que la obtención de imágenes tridimensionales determina con precisión (puntos de referencia) la posición de las estructuras anatómicas ocultas, cuyas ubicaciones generales solo pueden ser estimadas durante la intervención incremental manual humana. Como resultado, el robot, guiado por las imágenes de las estructuras anatómicas ocultas, puede extirpar de manera segura el hueso que al operador humano hace ciego. 13
Capacitación y Entrenamiento: La cirugía robótica sirve para un propósito y un entrenamiento relativamente corto permite que los cirujanos consigan resultados comparables con los de la cirugía mínimamente invasiva, brindando mayores beneficios a los pacientes. 1 Entrenar residentes en el uso de los sistemas robóticos presenta nuevos retos a los responsables de la formación de venideras generaciones de cirujanos de todas las especialidades. En este sentido, un abordaje sistemático en la formación de los cirujanos con las mencionadas técnicas, debe permitir un entrenamiento seguro y efectivo. 2
Viabilidad económica: Aunque las pruebas actuales han mostrando beneficios para el paciente al disminuir su estadía hospitalaria, disminución de la morbilidad, mortalidad y el índice de readmisiones, se necesitan más estudios controlados prospectivos que avalen plenamente los mismos. El costo inicial de un sistema quirúrgico robotizado es de aproximadamente 1.5 millones de dólares, unido a una cuota de mantenimiento anual aproximada de 100 000 y 200 por el instrumental desechable utilizado en los casos, lo que significa una inversión financiera importante. Lo anterior presupone realizar un análisis del costo/efectividad y costo-beneficio de la adopción de cirugía robótica en Otorrinolaringología y Cirugía de Cabeza y Cuello, estableciendo su empleo al máximo de sus potencialidades y por la mayor cantidad de especialidades quirúrgicas existentes en un centro hospitalario, como alternativa para reducir los costos de adquisición y uso. 8, 10
CONSIDERACIONES FINALES
El conocimiento por nuestros especialistas de la evolución tecnológica que acontece en el mundo actual, se convierte en una necesidad primordial, con vistas a afrontar los cambios que trae aparejado el empleo de los sistemas quirúrgicos robóticos aquí analizados. Aunque estas tecnologías no están al alcance de muchos países en vías de desarrollo, entre los cuales se incluye el nuestro, al que se le añaden los efectos del bloqueo económico y financiero establecido por la mayor potencia mundial, la cual es productora y propietaria de las patentes de sistemas como el da Vinci®, lo que presupone la imposibilidad de su adquisición mientras existan las prohibiciones que impone tal política. Ante circunstancias tan adversas, la visión que debe primar debe ser la de conocer los principales beneficios de su empleo, los retos que impone la capacitación y entrenamiento del personal que interviene en su manejo, así como el seguimiento de las investigaciones clínicas que en este campo se realizan en el mundo; considerando que en el futuro pueda engrosar nuestro arsenal terapéutico, en aras de brindar la mejor atención a nuestro pueblo y al resto de los países del mundo que hoy reciben nuestra ayuda solidaria en la esfera de la salud.
REFERENCIAS BIBLIOGRÁFICAS
Recibido: 10 de marzo de 2013
Aprobado: 25 de mayo de 2013
Héctor Hernández Sánchez. Hospital Militar Central "Dr. Luís Díaz Soto". La Habana, Cuba. Correo electrónico: hectorhs@infomed.sld.cu